


【京都先端科学大学工学部】Phát triển "bộ não" cho robot có thể làm việc trong nhiều môi trường khác nhau
Để tải/đăng ký nhận tài liệu của 京都先進科学大学工学部, các bạn hãy click vào ảnh bên dưới nhé!

Khi chọn trường, nhiều người băn khoăn không biết mình sẽ được học với những giảng viên nào.
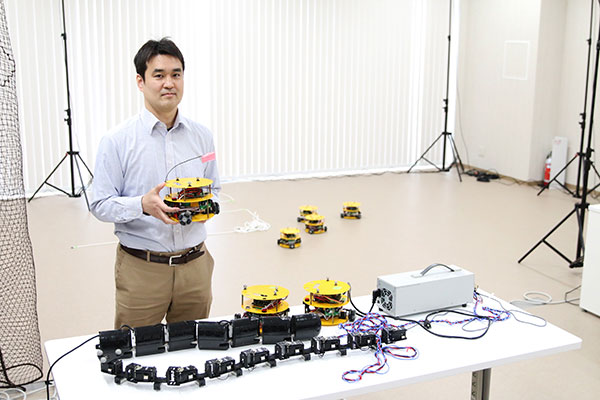
Bài viết sau đây xin giới thiệu bài phỏng vấn thầy Hiroaki Fukushima thuộc ngành Hệ thống Cơ và Điện, Khoa Kỹ thuật, Trường Đại học Khoa học Tiên tiến Kyoto, người có chuyên môn là "Phát triển các thuật toán điều khiển được gọi là 'Bộ não' của Robot."
Q1: Thầy có thể cho biết yếu tố nào đã thúc đẩy thầy bắt đầu công việc nghiên cứu hiện nay được không?
Tôi bắt đầu công việc nghiên cứu hiện tại của mình khi tôi được giao phòng thí nghiệm "kỹ thuật điều khiển" để nghiên cứu tốt nghiệp vào năm thứ4 đại học. Kỹ thuật điều khiển không chỉ là ngành học của người máy mà còn rất quan trọng đối với việc điều khiển người máy, và vì tôi vốn dĩ quan tâm đến phần mềm của người máy hơn là phần cứng, nên tôi đã bắt đầu nghiên cứu về “kỹ thuật điều khiển”. Trước đây, tôi không thích toán học và vật lý cho lắm, nhưng khi tôi nhận ra rằng chúng thực sự hữu ích để giải quyết các vấn đề thực tế trong kỹ thuật điều khiển, tôi bắt đầu nhận ra chúng thú vị như thế nào.
Q2: Nghiên cứu "kỹ thuật điều khiển" là công việc như thế nào?
Kỹ thuật điều khiển là nghiên cứu các phương pháp để tạo ra các hệ thống khác nhau, không chỉ rô bốt, hoạt động như mong muốn. Mục đích chính là phát triển một thuật toán điều khiển xác định lượng hoạt động của hệ thống theo tình huống.


Q3: Thầy có thể chia sẻ cụ thể hơn về các lĩnh vực nghiên cứu mà thầy đặc biệt chú trọng?
Một trong số đó là kỹ thuật đang điều khiển một nhóm robot. Bằng cách phối hợp nhiều robot, có thể thực hiện các nhiệm vụ khó có thể thực hiện được chỉ với một robot duy nhất và nó được kỳ vọng sẽ mang lại các lợi ích như giải quyết vấn đề nhanh hơn thông qua công việc song song và ít ảnh hưởng đến toàn bộ hệ thống nếu một robot bị hỏng.
Và thứ hai là điều khiển robot hình dạng con rắn. Robot hình rắn với hình dáng thuôn dài dự kiến sẽ được ứng dụng vào việc thu thập thông tin trong không gian hẹp. Robot dạng rắn di chuyển bằng cách thay đổi hình dạng cơ thể thay vì bánh xe hoặc bánh xích lái rất thú vị vì chúng có các đặc tính khác với các đối tượng điều khiển thông thường và phương pháp điều khiển vẫn chưa được thiết lập.
Q4: Trong tương lai, thầy muốn đóng góp như thế nào cho xã hội, bằng nội dung nghiên cứu hiện nay?
Robot được kỳ vọng sẽ hỗ trợ con người không chỉ trong các nhà máy mà còn trong những môi trường nguy hiểm mà con người không thể bước vào và xã hội nói chung. Để đạt được điều đó, không chỉ phần cứng robot mà cả phần mềm như thuật toán điều khiển cũng cần phải phát triển hơn nữa. Trong khi kết hợp công nghệ trí tuệ nhân tạo đang phát triển nhanh chóng, chúng tôi sẽ tập trung vào các đối tượng không thể xử lý bằng các phương pháp kiểm soát hiện tại như những phương pháp đã đề cập ở trên.

〇 Lịch Open Campus trong thời gian tới
Thứ Bảy, ngày 6/8, Chủ nhật, ngày 7/8
Chủ nhật, ngày 28/8
Chủ nhật, ngày 25/9
Tại cơ sở Tahata, Kameoka và các cơ sở khác, Open Campus đều diễn ra từ 10:00~14:00
※Tại cơ sở Tahata, các khoa có thể đối ứng bằng tiếng Anh(Khoa Kỹ thuật)
〇 Lịch nhận hồ sơ nhập học tháng 9/2023 được công bố trên WEB của trường từ tháng 5
https://www.kuas.ac.jp/en/faculty-of-engineering/undergraduate-ap/u-deadlines/#ap_link
Comments
登録されたコメントがありません。